
自動運転・先進運転支援システム(AD/ADASシミュレーション)向け
ゼンリン高精度地図ソリューション
移動の未来を支える

自動運転研究の最前線で選ばれるソリューション
メーカー・研究機関での採用実績多数
| メーカー・研究機関での |
|




こんなお悩みありませんか?

地図データの整備・変換・
検証コストが膨大である

レーン形状・道路標高・
勾配を再現した道路モデル作成に
手間がかかる

全国横断検索、異常ケース抽出が
テストシナリオ作成の工数を増幅
ゼンリン高精度地図ソリューションが、
AD/ADAS 開発の課題を一気通貫で解決します。
ゼンリン高精度地図ソリューションが選ばれる理由
国内主要自動車メーカーが採用!
OpenDRIVEやRRHD、FBX等、シミュレーターの主要フォーマットに
対応。現実世界を精緻に再現したシミュレーション実現をサポートし
ます。

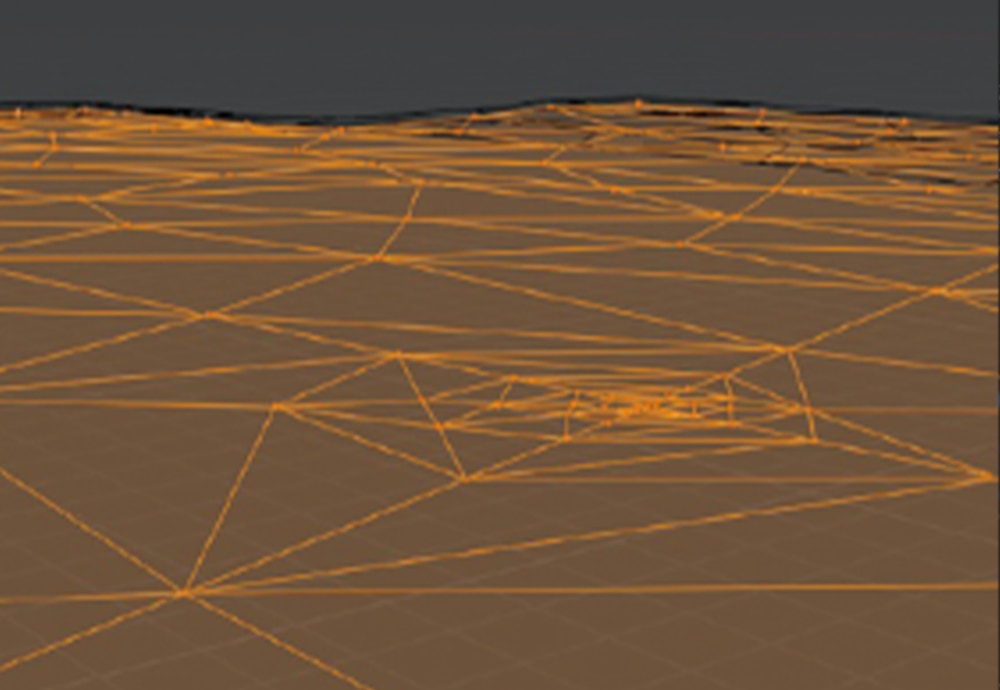
レーン毎の形状や道路標高情報を取得可能
全国の自動車専用道路や主要一般道を対象にレーン単位の詳細形状や
標高情報、縦断/横断勾配まで取得可能。
各種シミュレーションや分析/シナリオ検討にご利用いただけます。
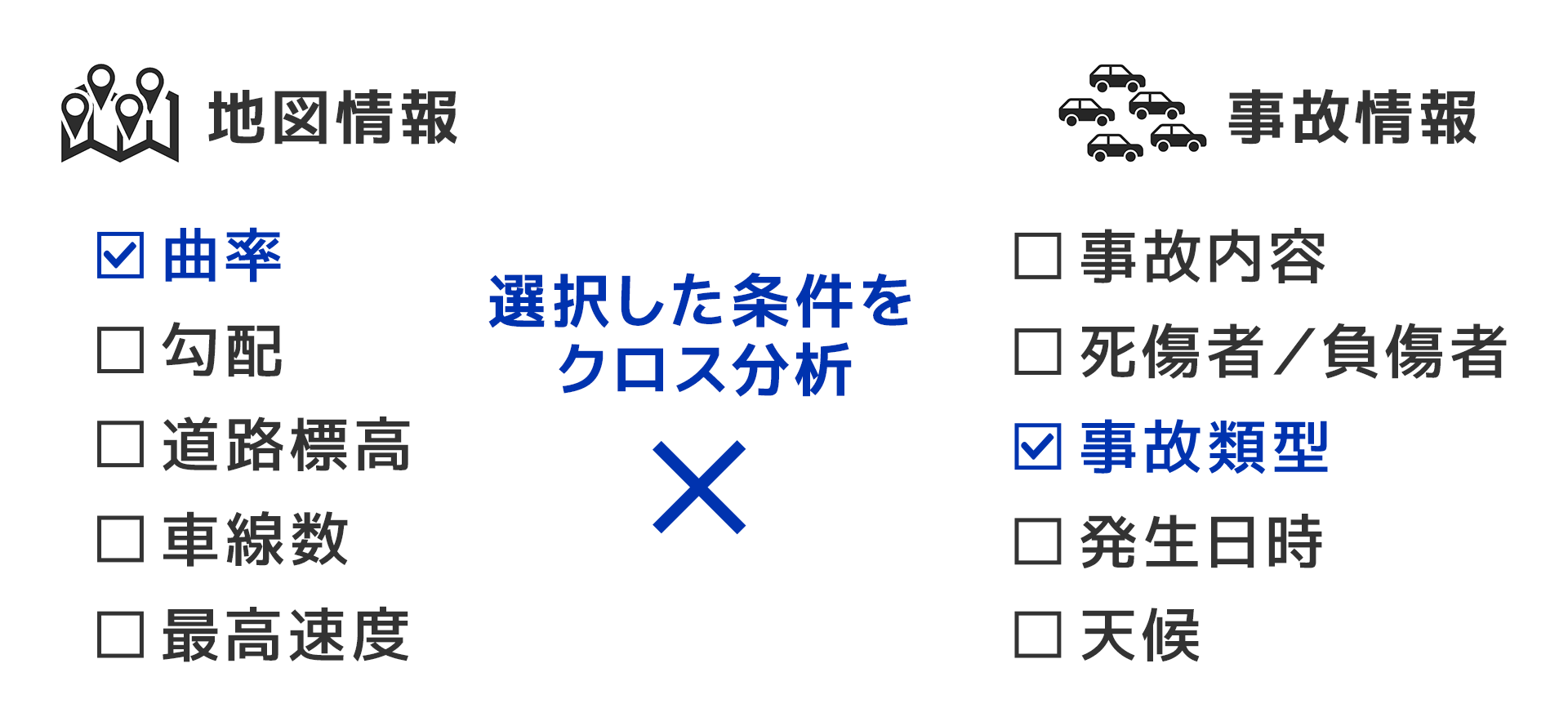
道路情報と事故情報を掛け合わせた
分析/検索技術
曲率・勾配・制限速度等の道路属性情報と事故情報を掛け合わせ、
条件に合致する道路を簡単に検索・傾向分析まで行えます。
エリアやルートを指定したデータ出力機能も具備し、難所発見から
道路モデル生成に必要なデータ出力までワンストップで提供します。

ゼンリン高精度地図ソリューションがわかる
お役立ち資料2点セット
- サービス資料
- ビジネスガイド
- サービス資料
- ビジネスガイド

貴社のご要望に合わせたご提案や開発支援を承ります。
お気軽にお問い合わせください。
\1分で完了!/
\まずは気軽に無料相談/
ゼンリン高精度地図ソリューションのサービス紹介
ゼンリンの整備/提供する地図を、お客様のご活用用途に合わせ最適な形に変換します。
コンサルティングも含め、サービス/ソリューション開発を行った上でご提供可能です。



全国ナビ地図
住所・市街地図と全国道路ネットワーク+70万件以上のPOIを収めた標準精度ベースマップ
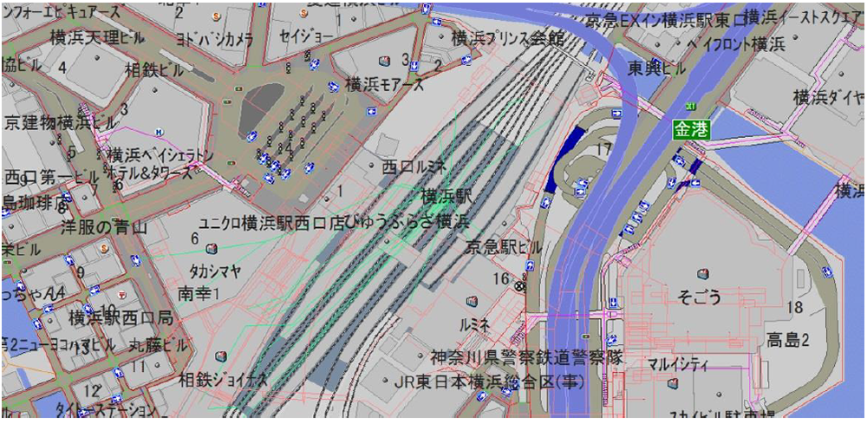
豊富な道路 / 地図情報は、道路モデル作成だけでなく、走行ログの分析など、
様々な用途に利用できます。
✅住宅地図を基に、住所、市街地図を生成
✅日本全国:幅員3m以上の道路 をネットワーク化
※私道、農道等を除く
✅POIはオリジナル70万件+タウンページデータの提供が可能
✅定期更新で、常に高鮮度な道路座標・進行方向情報・停止線等の情報を提供
提供可能な道路情報(一部抜粋)
1.道路形状情報、道路(リンク)長さ
2.道路種別(高速道 / 国道 / 県道 / 一般道 / 細道路 等)
3.道路名称 / 車線数 / 幅員 / 上下線分離情報
4.一方通行 or 双方向通行 / 道路進行方向
5.一時停止線の位置情報
6.最高速度情報
7.事故多発地帯
8.高さ、幅、重量制限
提供可能なその他のデータ(一部抜粋)
1.施設関連の情報
2.交差点検索
3.バス停情報
4.天候情報
5.EV充電スポット検索
提供可能な道路情報(一部抜粋)
1.道路形状情報、道路(リンク)長さ
2.道路種別(高速道 / 国道 / 県道 / 一般道 / 細道路 等)
3.道路名称 / 車線数 / 幅員 / 上下線分離情報
4.一方通行 or 双方向通行 / 道路進行方向
5.一時停止線の位置情報
6.最高速度情報
7.事故多発地帯
8.高さ、幅、重量制限
提供可能なその他のデータ(一部抜粋)
1.施設関連の情報
2.交差点検索
3.バス停情報
4.天候情報
5.EV充電スポット検索
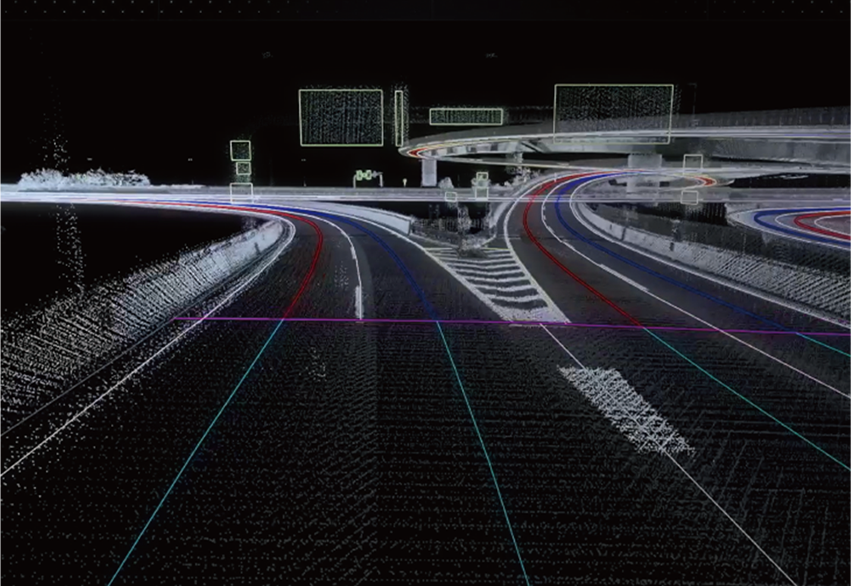
高精度地図
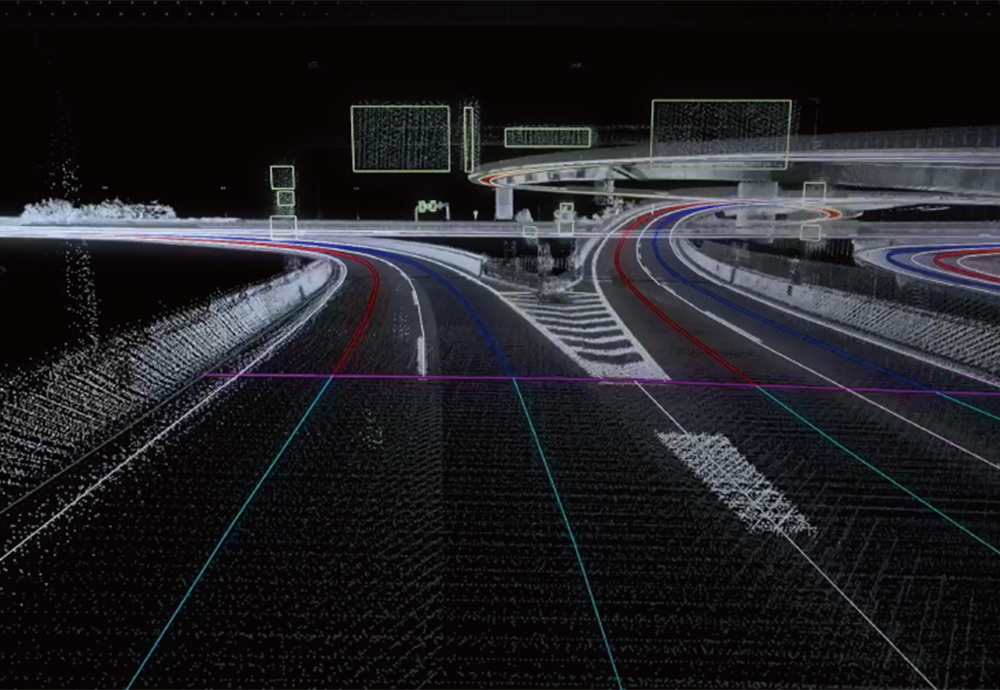
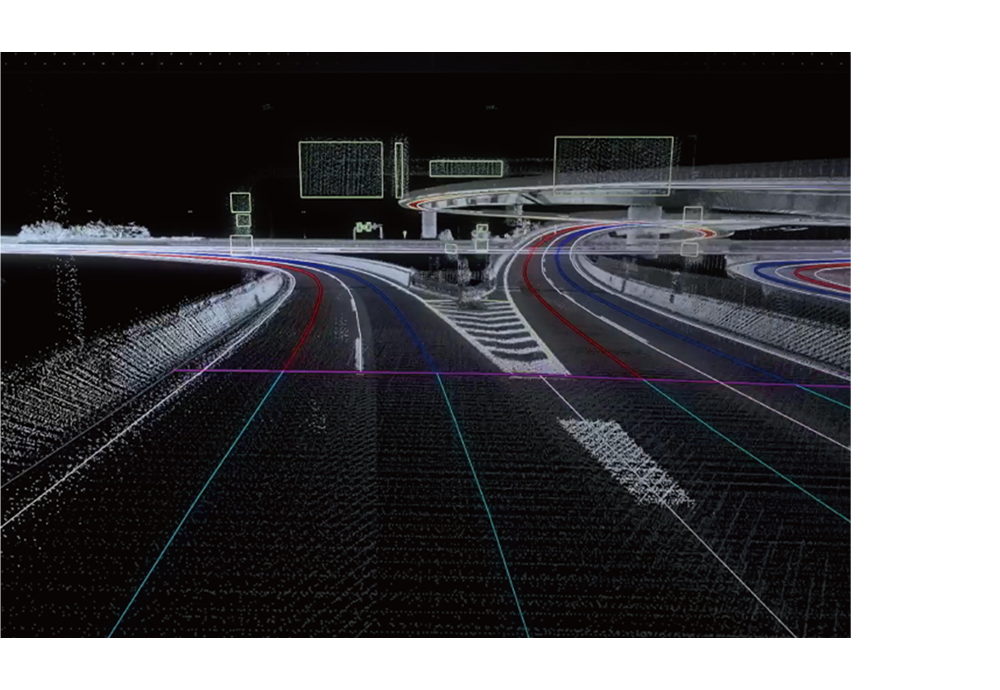
レーン形状・標高・交通規制を収録したAD/ADAS 向け高精度マップ
自動車専用道路 高精度地図
©ZENRIN CO., LTD. ©Dynamic Map Platform Co., Ltd.
一般道 高精度地図
出典/MathWorks社
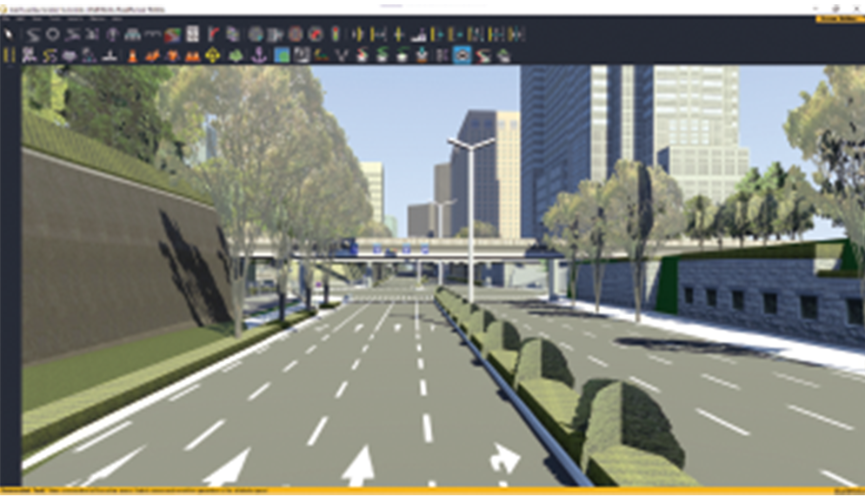
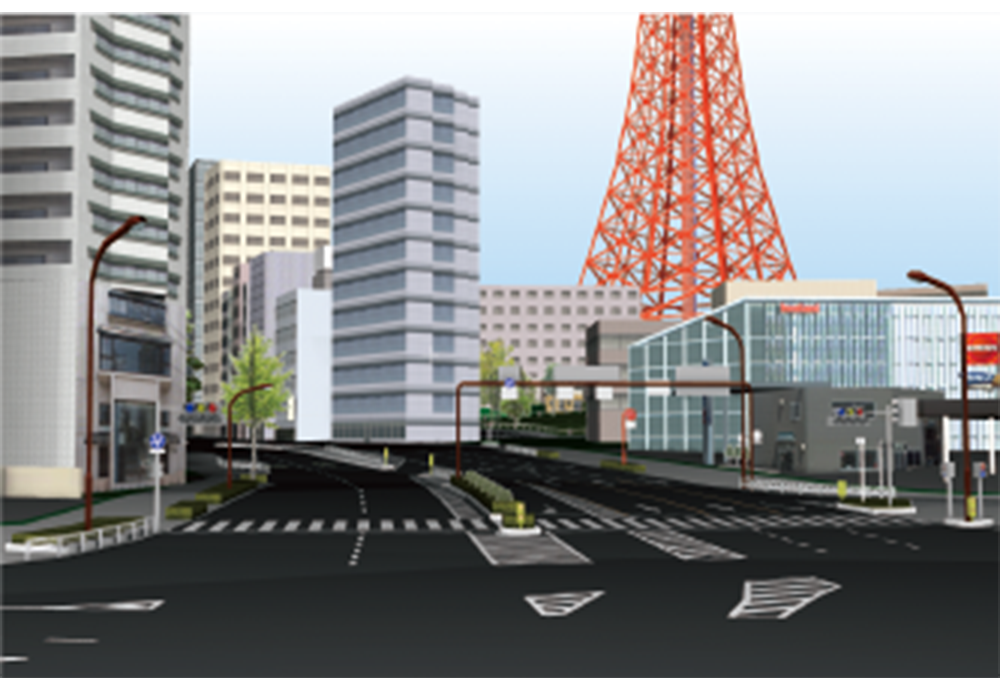
レーン毎の形状/道路標高情報を取得できます。
現実世界を今まで以上に精緻に再現したシミュレーションを実現します。
✅走行レーンプランニング、センシング支援、高精度な自車位置特定などに活用可能
✅レーン毎の正確な形状、および、レーン毎の横断/縦断勾配/道路標高等も取得可能
✅信号・標識等の正確な位置/向き等の情報も正確に表現可能
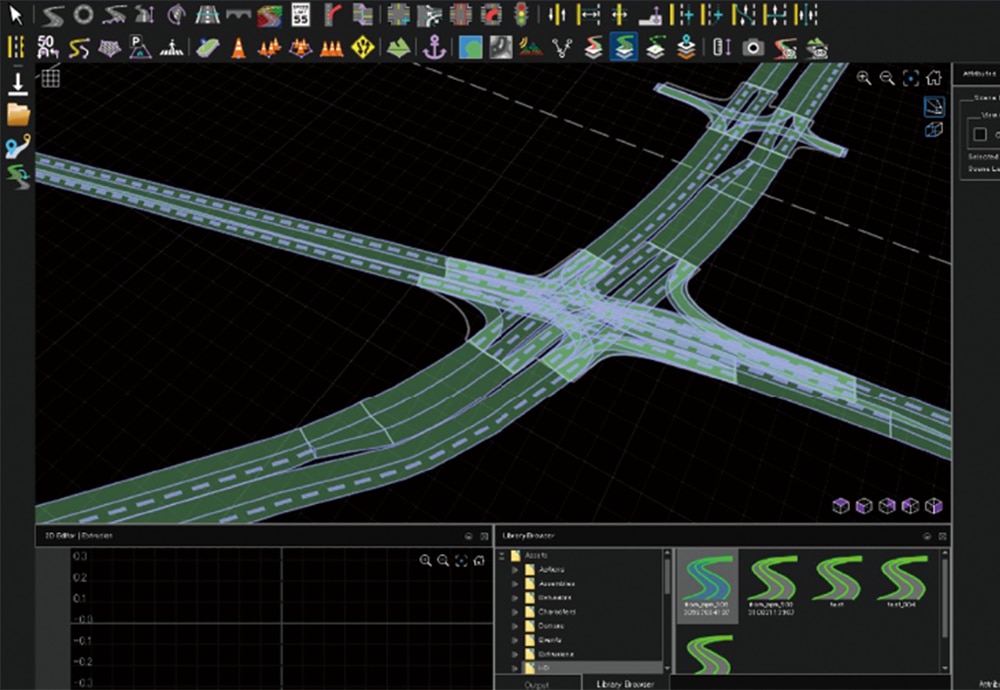
ゼンリンデータコム製コンバータで高精度地図を簡単に変換
各種シミュレーションや分析/シナリオ検討に活用可能
- 自専道
- 一般道
- ゼンリンデータコム製 コンバータ
▶RRHD出力→OpenDRIVE出力
▶FBXファイル出力
▶中間ファイル(csv)出力
※RRHD→OpenDRIVEへの変換については、RoadRunnerにて対応可能

- 各種シミュレーション

- 分析/シナリオ検討
▶ FBXファイル出力
▶ 中間ファイル(csv)出力

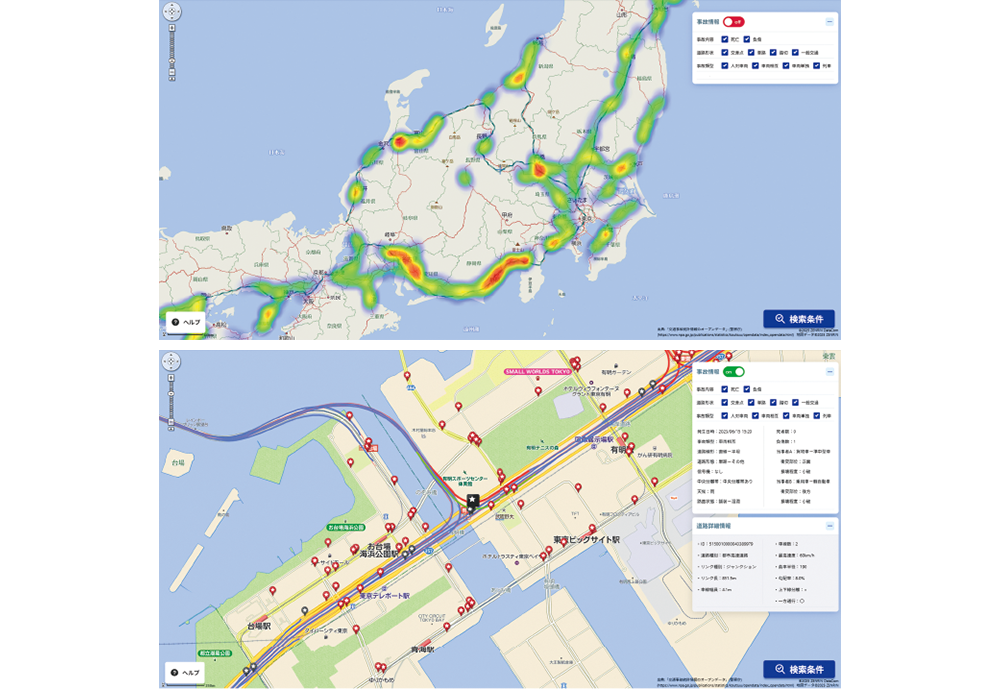
地図データクロス分析ツール
難所発見からODD設定検討まで一括支援する地図分析ツール
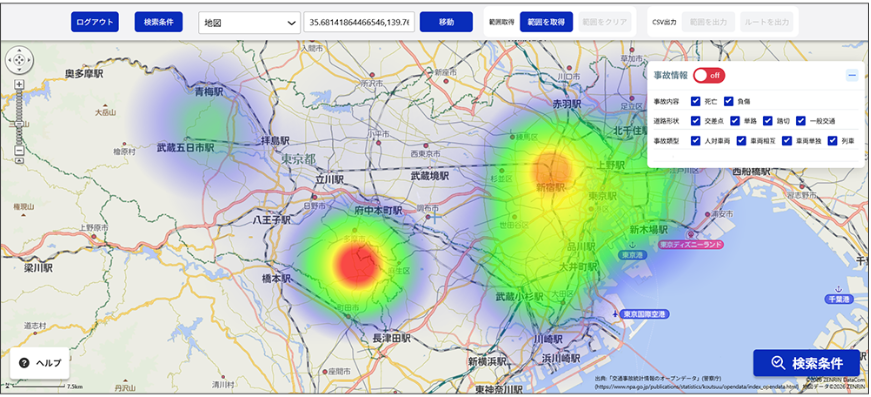
各種パラメータを複数条件指定し日本全国を網羅的に分析·可視化します。
✅ODD (Operational Design Domain)設定検討に活用可能
✅最適なシミュレーションシナリオ実行エリア検討が楽に
✅シナリオ実施エリアの検討やエッジケースとなり得る地理的難所の検索を支援
地図情報 × 事故情報 指定した条件を検索 | ||||||||||||||||
| 選択した |
| ||||||||||||||
地図情報 × 事故情報 指定した条件を検索

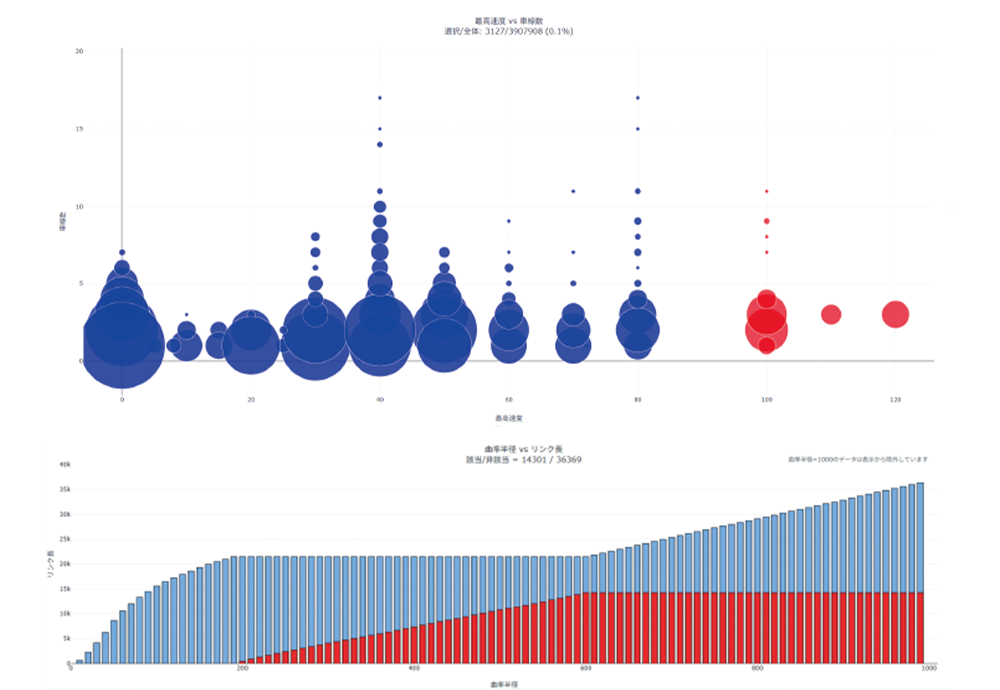
傾向分析 | 分布確認 |
日本全国の各種パラメータを (曲率·勾配等)をグラフ表示 | 分析結果·該当地点を地図上に表示
|
傾向分析
日本全国の
各種パラメータを(曲率·勾配等)をグラフ表示
分布確認
分析結果·該当地点を地図上に表示
わずか2ステップでシミュレータ環境下における
道路モデルを簡易構築可能
①シミュレーション実行したい場所を選択+CSV形式で出力
CSV形式だけでなく、OpenDRIVE形式での出力も可能
矩形でエリア指定
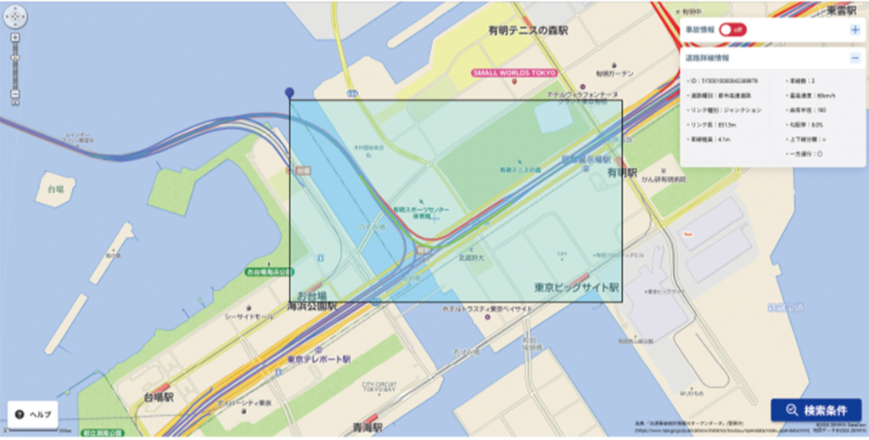
ルート指定

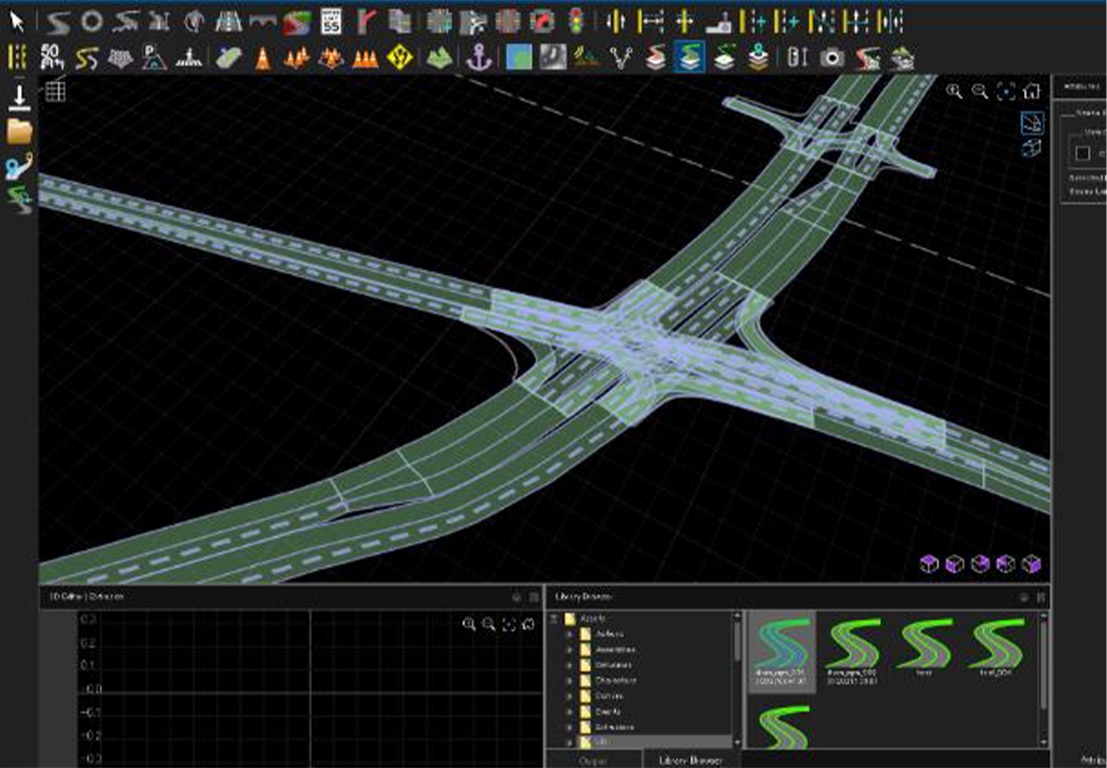
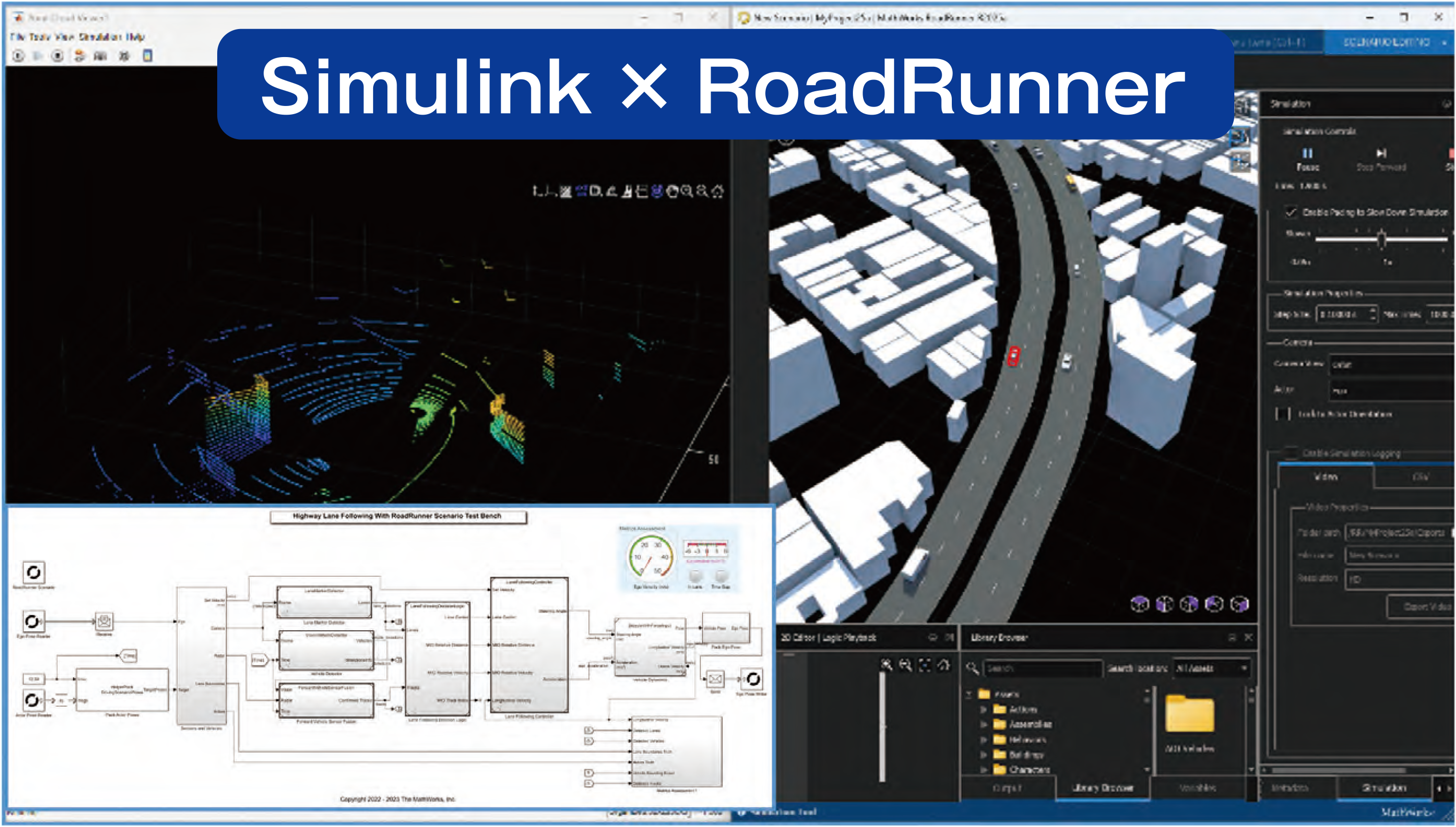
②シミュレーションツールにCSVデータを取り込み
MathWorks社:MATLAB®、RoadRunnerに取り込み選択エリア/ルートの道路モデルを簡単に構築
各種センサモデルを活用したセンサシミュレーションも可能
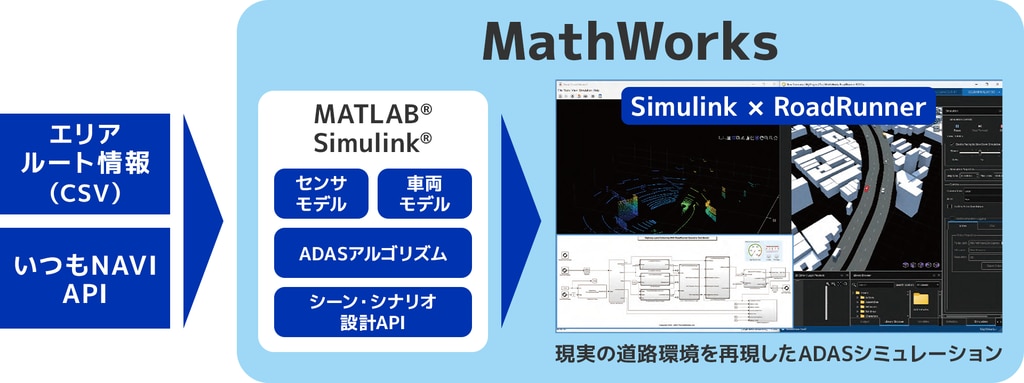
エリアルート情報(CSV) |
| |
いつもNAVIアプリ |
MATLAB Simulink
センサモデル | 車両モデル |
ADASアルゴリズム
シーン・シナリオ設計API

現実の道路環境を再現したADASシミュレーション
✨より便利に!より使いやすい!を実現するプレミアム機能
生成AIを活用した自然言語による条件設定·検索を実現します。
「高速道路で減速が必要そうな場所」「関東平野の峠道」といった
あいまいな表現での検索も可能です。※現在、鋭意開発中
| ✨より便利に!より使いやすい! |
生成AIを活用した自然言語による条件設定·検索を実現します。 「高速道路で減速が必要そうな場所」「関東平野の峠道」といった あいまいな表現での検索も可能です。 | |
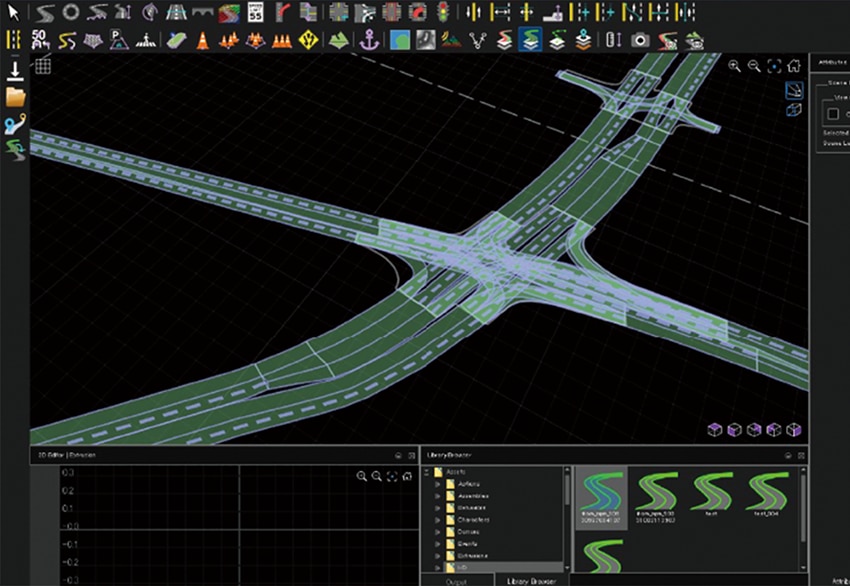
ゼンリンデータコム×MathWorks社連携
緯度経度を指定するだけ!
ゼンリンSD-Mapからシミュレーションに必要な道路モデルを瞬時に構築
勾配や交差点を伴う道路モデルを自動生成(RoadRunner)
ゼンリン
SD-Map
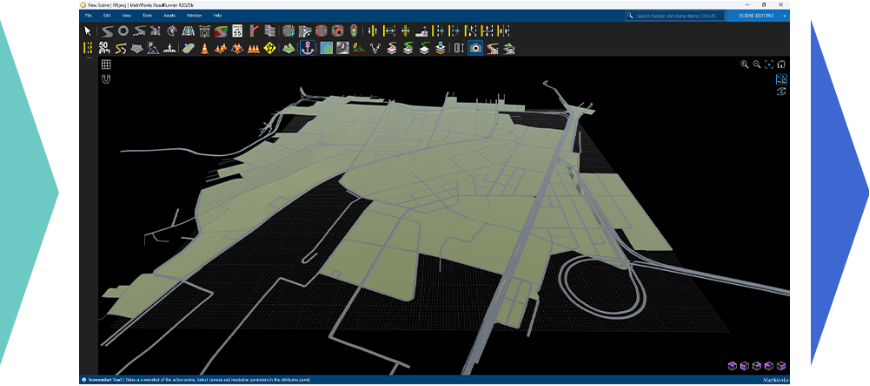
OpenDRIVE、FBX、
glTF、OBJ等
多様なフォーマットへ
自動変換
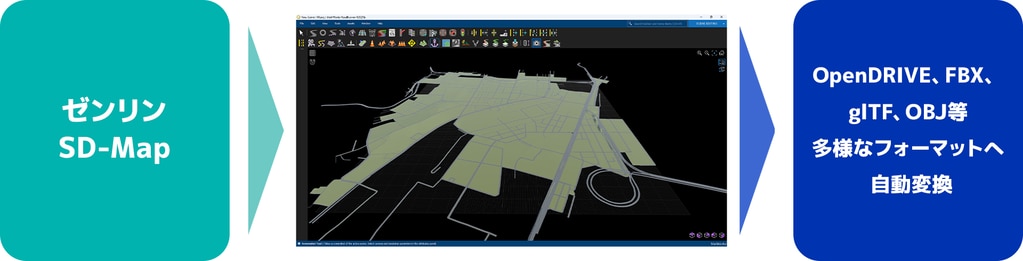

MATLAB®、Simulink®によるADAS・自動運転シミュレーション

ゼンリン高精度地図ソリューションがわかる
お役立ち資料2点セット
- サービス資料
- ビジネスガイド
- サービス資料
- ビジネスガイド
貴社のご要望に合わせたご提案や開発支援を承ります。
お気軽にお問い合わせください。
\1分で完了!/
\まずは気軽に無料相談/
ゼンリン× CARLA Simulator連携
ゼンリンの道路ネットワーク/3D地図がCARLA Simulatorに取り込めます。
交通流シミュレータ連携
PTV VISSIM、SUMO等、
有カツールの結果を可視化
MATLAB連携
車両の挙動の物理モデルや
制御のふるまいの検証が可能
複数ツールのCo-Sim
MATLAB. CarSim, VISSIMなどの
複数種類のシミュレーションを統合可能
交通流シミュレータ連携
PTV VISSIM、SUMO等、有力ツールの結果を可視化
MATLAB連携
車両の挙動の物理モデルや制御のふるまいの検証が可能
複数ツールのCo-Sim
MATLAB、CarSim、VISSIMなどの複数種類のシミュレーションを統合可能
ゼンリン地図API×PTV VISSIM ×CARLA連携の図
地図 取り込み/シミュレーション実施までのフロー
- ゼンリン 地図API
- ゼンリン3D都市モデル
©ZENRIN
- RoadRunner(MathWorks社製品)
出典/MathWorks社
RoadRunnerのUIよりゼンリンの提供する
道路NW/建物形状を読み込み可能。
リアルなシミュレータ用データを
簡単に作成することができます。
- CARLA (自動運転シミュレータ)

3rd Partyツールとの連携
- PTV VISSIM
- MATLAB / Simulink
- CarSim
- Rosetc...
 ©ZENRIN
©ZENRIN
 出典/MathWorks社
出典/MathWorks社道路NW/建物形状を読み込み可能。
リアルなシミュレータ用データを
簡単に作成することができます。


・MATLAB/Simulink
・CarSim
・Ros
etc…
料金
お客様のビジネスに合わせた柔軟なプランニングが可能です。
まずはお気軽に無料相談・お見積りをご利用ください。
\1分で完了!/
\まずは気軽に無料相談/
導入事例
国内車メーカーも採用!
業界を代表する企業様にご導入いただいております。
他にも大学・サプライヤーなど、
様々な研究・開発シーンで導入が進んでいます。
大学
サプライヤー
研究機関
|
|
|
大学 | サプライヤー | 研究機関 |

導入までの流れ
STEP
01
お問い合わせ
まずは、資料請求やお問い合わせフォームからお気軽にご連絡ください。専門スタッフが対応いたします。
STEP
02
お打ち合わせ
お客様の課題やご要望を詳しくヒアリングし、最適なソリューションとカスタマイズプランをご提案します。
STEP
03
ご契約
仕様を確認の上、ご契約を取り交わさせていただきます。
STEP
04
納品
お客様専用のカスタマイズが必要な場合、専門の開発チームが対応いたします。完成したシステムやデータを、ご要望に基づき納品いたします。
STEP
05
ご利用開始
運用を開始し、サポート体制も万全に整備しております。ご不明点がありましたら、担当営業またはサポート窓口が丁寧にお答えします。
MATLAB、Simulinkは、MathWorks社の登録商標です
貴社のご要望に合わせたご提案や開発支援を承ります。
お気軽にお問い合わせください。
\1分で完了!/
\まずは気軽に無料相談/



